

航空案例
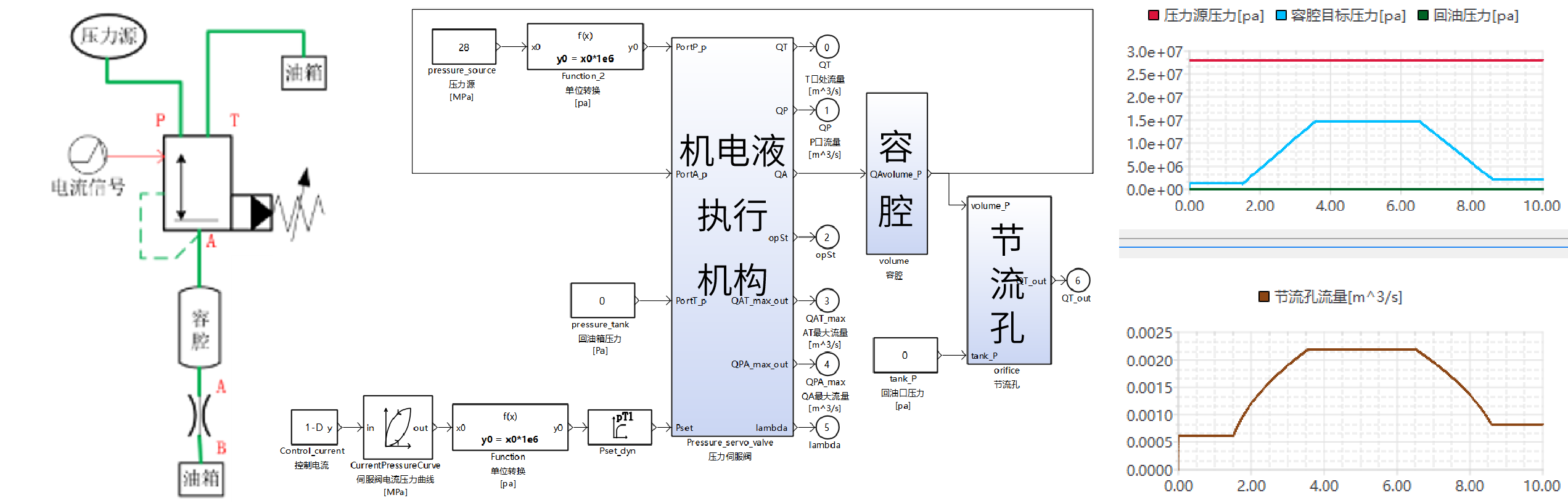
机电液执行机构
机电液执行机构广泛应用于飞机的各类舵机和操纵系统,如飞机机轮刹车系统等。机电液执行机构的作用是将小功率电信号转换为大功率的液压输出。用GCKontrol构建液压部件模型和液压系统模型,并设置系统/子系统的多种参数,可实现对系统动态响应、稳态响应和系统总体性能的分析。
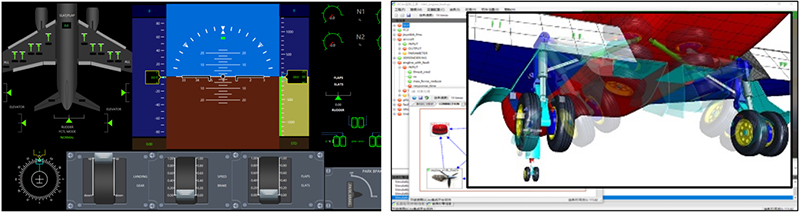
数字孪生飞机起落架虚实融合平台
本案例虚实融合平台由GCAir和相关参试设备组成,参试设备包括起落架、控制单元、模拟器等,其中模拟器用于人机交互。基于GCAir仿真测试验证一体化平台完成了系统构建、模型管理、参数配置、总数和端口定义、FMU执行顺序分组及调度。同时通过GCAir实现了飞机起落架的3D动态视景展示、通过人机交互设备模拟器的输入控制、实现驾驶员在环仿真。本案例完成了系统总体综合虚拟验证、虚实融合、数字孪生等功能。

| 起落架仿真系统模型库 | |||
|---|---|---|---|
| 模型名称 | 输入信息 | 输出信息 | 备注 |
| 操纵指令 | - | 采集信号 | 模型/实物 |
| 控制单元 | 动作指令 | 转弯信号 | 模型/实物 |
| 作动机构 | 转弯信号 | 作动机构信息 | 模型/实物 |
| 接口 | 接口输入信息 | 接口输出信息 | 模型/实物 |
| 反馈模块 | 起落架数据 | 起落架数据 | 模型/实物 |
| 可视化模块 | 起落架数据 | 起落架运动状态 | 数学模型 |
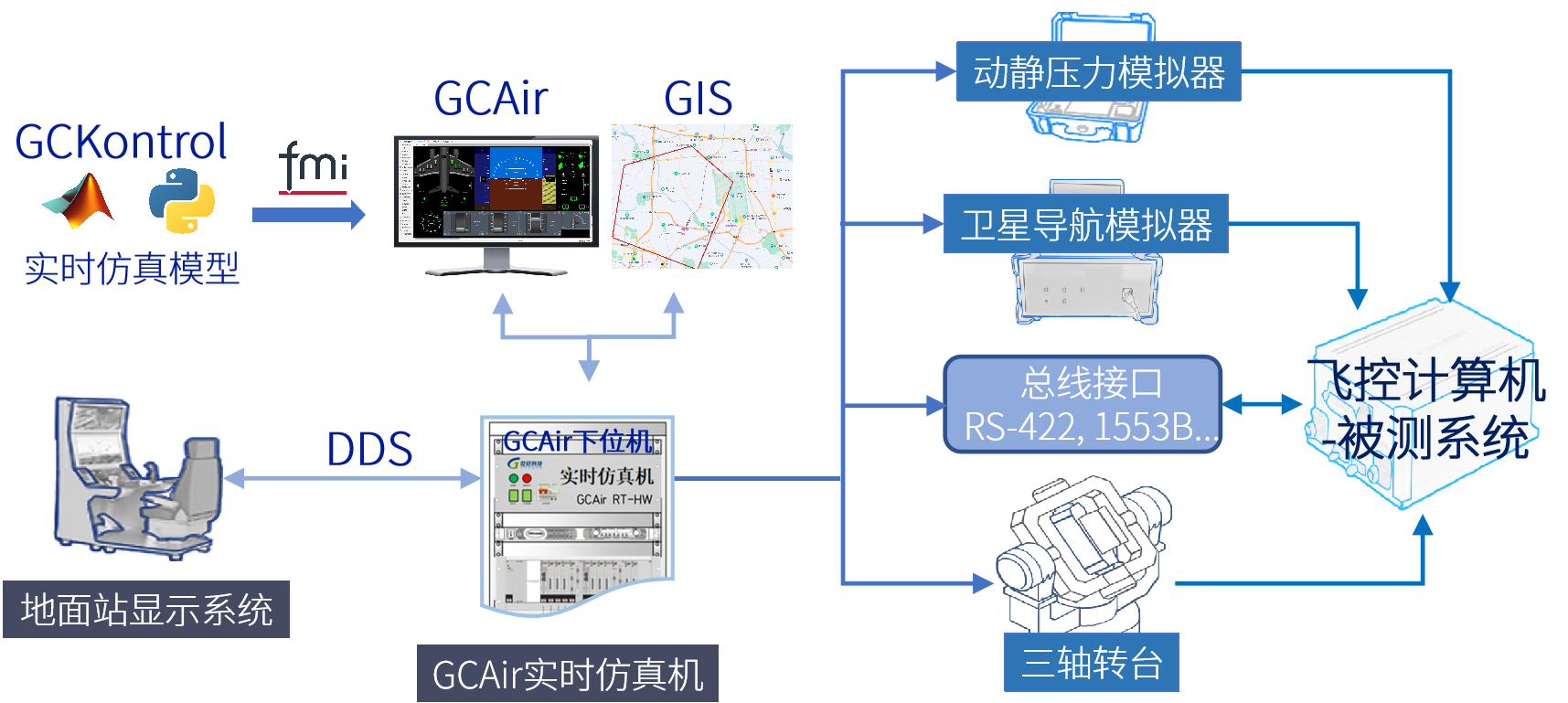
无人机飞行控制与管理系统适航性测试验证
采用GCKontrol+GCAir+TestManager全面工具链,完成了无人机试验综合管理系统,该系统硬件参测设备包括六部分:加速度转台、大气模拟器、角速度转台、卫星导航模拟器、地面站、飞控计算机。本案例完成了总体系统设计、多源异构系统集成,参测设备、激励设备硬件集成,完成了系统总体的半实物仿真,三维视景和数字孪生。并完成了自动化批量测试,自动化测试报告生成。实现了全面工具链对复杂装备系统设计研发过程的全生命周期覆盖。
| 全面工具链实现:无人机飞行控制与管理系统适航性测试验证 | |||
|---|---|---|---|
| GCAir系统 | GCAir功能实现 | 实物设备 | GCAir功能实现 |
| 系统配电管理 | 单个设备上、下电 | 加速度转台 | 远程上下电 |
| 所有设备同时上、下电 | 参数设置及设备运行 | ||
| 试验配置管理 | 试验配置管理-虚实切换 | 返回数据解析 | |
| 系统状态设置 | 模型初始化 | 远程停止 | |
| 视景系统初始化 | 大气模拟器 | 设备初始化 | |
| 参试设备初始化 | 模拟参数实时设定 | ||
| 故障注入 | 返回数据解析 | ||
| 系统状态监控 | 飞机模型参数监控 | 设备复位 | |
| 电子围栏飞行轨迹显示 | 角速度转台 | 远程上下电、初始化 | |
| 参试设备数据监控 | 角速率仿真 | ||
| 故障信息提示及记录 | 返回数据解析 | ||
| 试验自动化测试 -基于TestManager |
创建工程并编辑脚本 | 远程停止 | |
| 选择测试用例 | 卫星导航模拟器 | 初始化设置 | |
| 自动测试 | 连续轨迹发送 | ||
| 生成报告与数据导出 | 返回数据解析 | ||
| 视景系统 | 地景切换 | 远程停止 | |
| 机型切换 | 地面站 | 发送数据给地面站 | |
| 开启切换 | 地面站数据接收并解析 | ||
| 机头摄象机视角单独控制 | HUD面板视景叠加 | ||
| 手柄控制信号接收 | |||
