控制系统开发和嵌入式软件开发
解决方案综述
在系统研发过程中,通常把“系统”分解为“被控对象”和“控制系统”,这两部分交由不同的子部门研究,再进行整合,进而完成系统总体的验证。使用GCKontrol软件可完成被控对象、控制算法的建模仿真,实现模型在环(MiL)验证。GCKontrol软件支持定点计算,能够自动生成符合安全标准的C代码,用户将验证好的控制算法C代码部署至控制器-嵌入式系统,并将控制器接入GCAir仿真系统闭环回路,可完成系统的硬件在环(HiL)仿真,从而实现对系统总体和控制算法的分析研究、评估优化。对于已验证的控制算法,用户可直接用于嵌入式软件开发,使得嵌入式软件的控制算法功能更键全、种类更丰富。
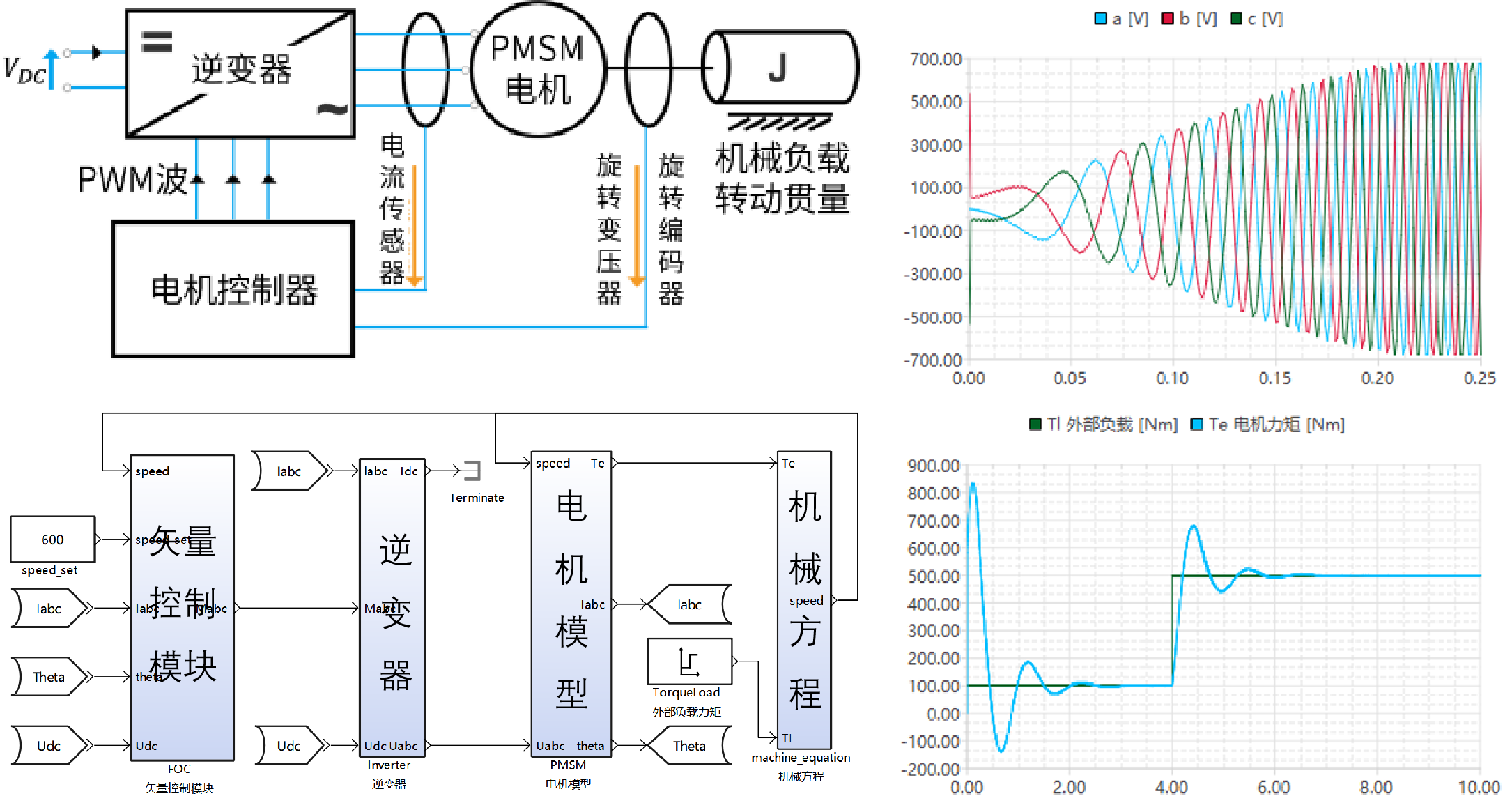
方案应用-永磁直流电机(PMSM)模型,定点计算实现
本系统包含PMSM(永磁三相同步电机)模型和FOC(矢量控制)模型,采用GCKontrol实现PMSM电机的FOC控制,在FOC控制中用到了三个PID控制环,从内环到外环依次是:电流环(转矩控制)、速度环(转速控制)、位置环(角位移控制)。基于该控制系统实现了多种应用场景的控制策略分析,验证后的控制系统算法具有安全性、可靠性、实时性。并且该控制算法支持定点运算,可部署至控制器-嵌入式系统,使控制器在系统闭环中运行稳定可靠。
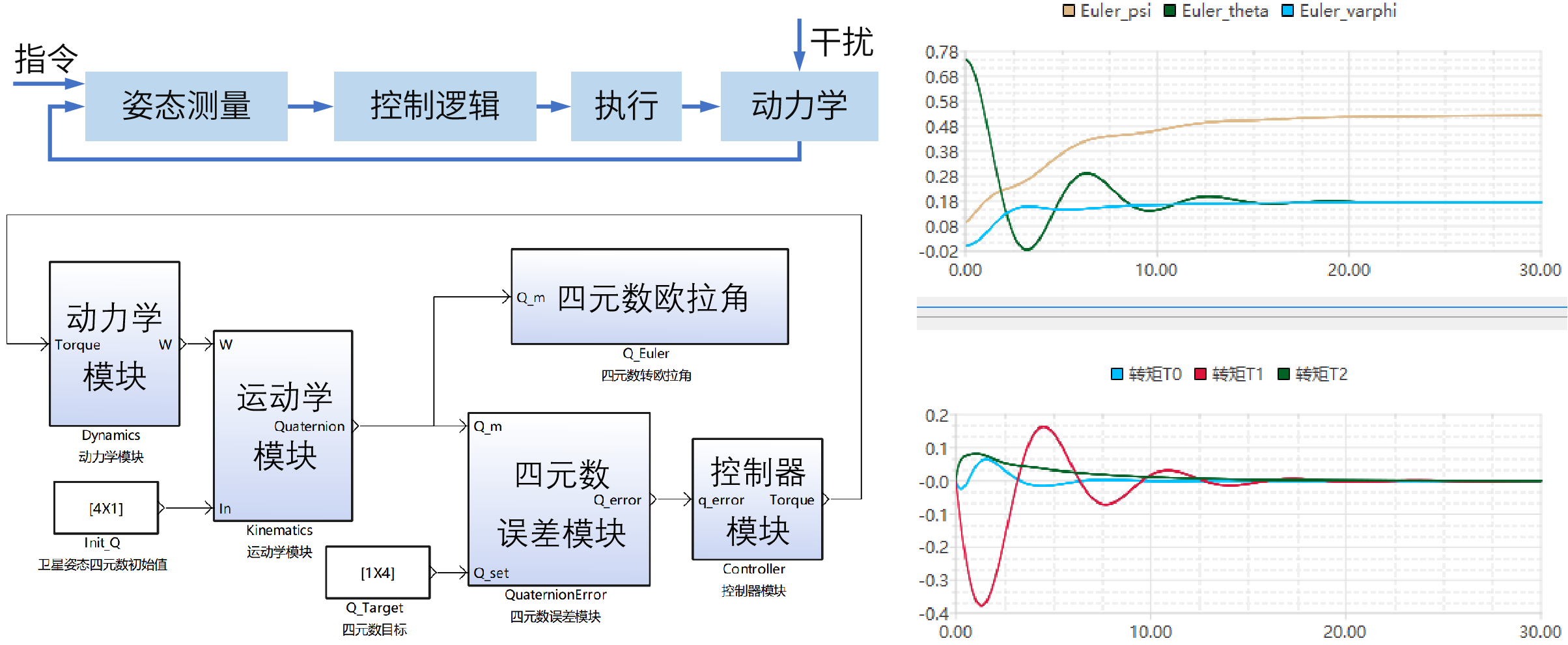
方案应用-卫星姿轨模型
卫星姿态控制系统由敏感器、控制逻辑单元(控制器)、执行和动力学模块组成。敏感器确定卫星姿态;控制器使电信号以正确顺序发送到力矩输出单元;并使卫星绕其质心转动;动力学输出再由敏感器监视,从而实现系统闭环。本案例采用GCKontrol完成卫星姿轨系统建模及控制,并对系统/子系统配置多种参数,验证了控制算法的有效性、实时性、可靠性。
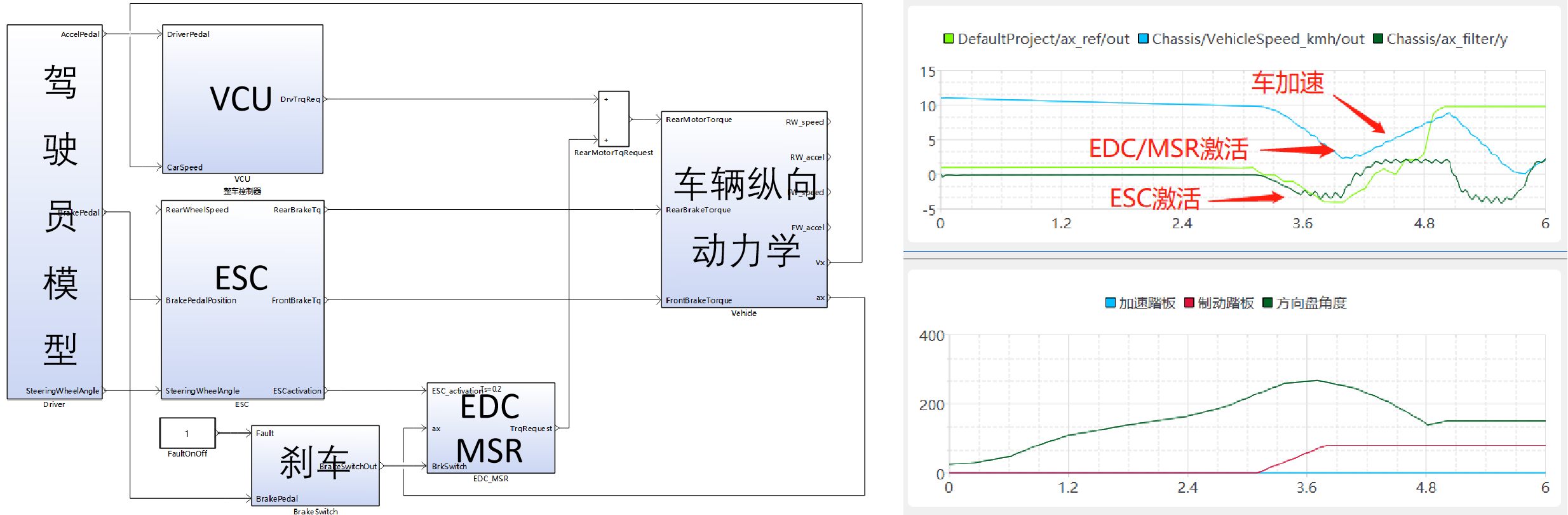
方案应用-汽车控制应用层开发
本系统以新能源汽车为研究对象,用GCKontrol搭建系统模型。该系统包括驾驶员(Driver)、整车控制器(VCU)、汽车电子稳定控制系统(ESC)、发动机阻力矩控制系统(EDC)和车辆纵向动力学模型(Vehicle)等,对系统建模、配置定点计算、完成系统仿真,实现对VCU控制算法的验证评估和优化。对优化好的VCU控制算法,生成C代码,部署至真实控制器-嵌入式系统,支持并实现了嵌入式软件的开发。